Aviso: Este post foi traduzido para o português usando um modelo de tradução automática. Por favor, me avise se encontrar algum erro.
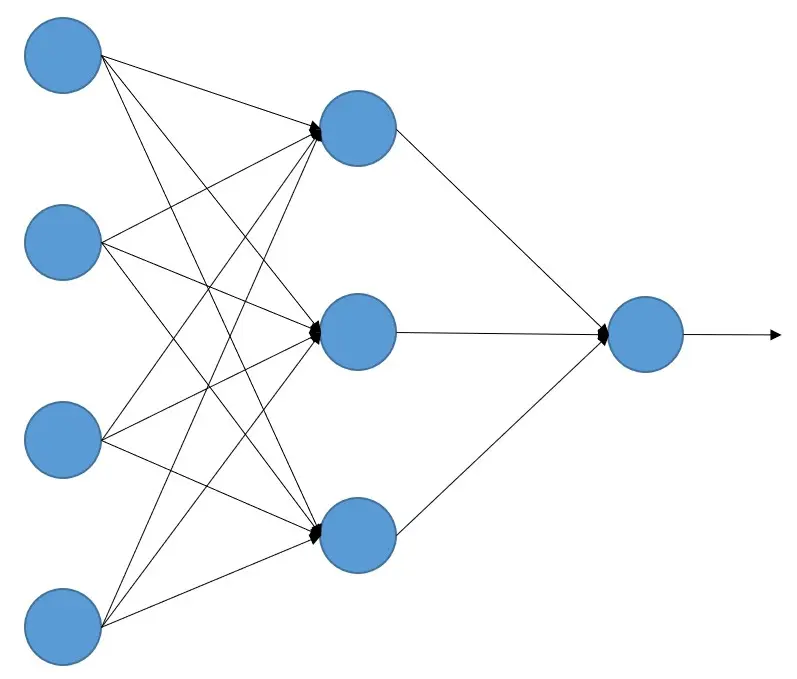
Como dissemos, um neurônio é uma unidade de processamento, recebe alguns sinais, realiza alguns cálculos e produz outro sinal.
Então vamos ver o exemplo mais simples, o caso em que se recebe um sinal e se obtém outro, e vamos ver isso com a regressão linear.
Suponhamos que fizemos algumas medições e obtemos os seguintes pontos
import numpy as npx = np.array( [ 0. , 0.34482759, 0.68965517, 1.03448276, 1.37931034,1.72413793, 2.06896552, 2.4137931 , 2.75862069, 3.10344828,3.44827586, 3.79310345, 4.13793103, 4.48275862, 4.82758621,5.17241379, 5.51724138, 5.86206897, 6.20689655, 6.55172414,6.89655172, 7.24137931, 7.5862069 , 7.93103448, 8.27586207,8.62068966, 8.96551724, 9.31034483, 9.65517241, 10. ])z = np.array( [-0.16281253, 1.88707606, 0.39649312, 0.03857752, 4.0148778 ,0.58866234, 3.35711859, 1.94314906, 6.96106424, 5.89792585,8.47226615, 3.67698542, 12.05958678, 9.85234481, 9.82181679,6.07652248, 14.17536744, 12.67825433, 12.97499286, 11.76098542,12.7843083 , 16.42241036, 13.67913705, 15.55066478, 17.45979602,16.41982806, 17.01977617, 20.28151197, 19.38148414, 19.41029831])Copied
import matplotlib.pyplot as pltplt.scatter(x, z)plt.xlabel('X')plt.ylabel('Z ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
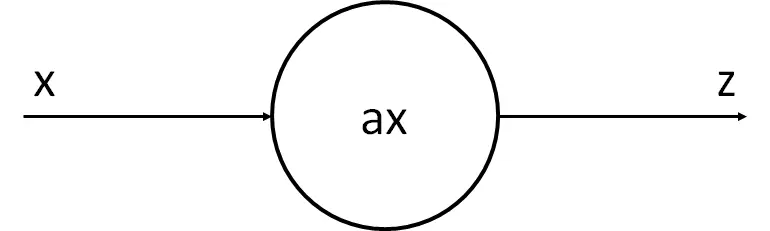
Como vemos, isso pode se assemelhar a uma regressão linear. Ou seja, podemos supor que o neurônio recebe x, multiplica por um número e gera z.
A partir daqui vamos mostrar como funcionam as redes neurais, só que com um exemplo simples de um único neurônio, depois vamos apresentar exemplos cada vez mais complexos, até explicarmos o funcionamento geral das redes neurais. Mas se você entender o que vai acontecer a seguir, vai entender as redes neurais.
Nossa neurônio tem o parâmetro a, que é o que queremos modificar para que a reta que vai gerar se assemelhe o máximo possível aos pontos. O processo de aprendizagem do nosso neurônio vai consistir em, por meio de alguns cálculos, determinar o melhor valor possível de a
Inicialização aleatória do parâmetro
Este exemplo é simples, mas quando temos redes neurais complexas e não sabemos quais valores seus parâmetros devem ter, o que se faz é inicializá-los aleatoriamente
import randomrandom.seed(45) # Esto es una semilla, cuando se generan números aleatorios,# pero queremos que siempre se genere el mismo se suele fijar# un número llamado semilla. Esto hace que siempre a sea el mismoa = random.random()aCopied
0.2718754143840908
O valor de a é 0.271875, vejamos que reta obteríamos se parássemos agora
z_p = a*xplt.scatter(x, z)plt.plot(x, z_p, 'k')plt.xlabel('X')plt.ylabel('Z ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
Como vemos, não se parece em nada, então vamos ter que fazer com que nosso neurônio *aprenda*
Cálculo do erro ou loss
Para buscar o melhor valor possível de a, queremos encontrar um valor que faça com que os valores previstos pela nossa neurônio tenham o menor erro possível em relação aos valores reais de z.
Neste tipo de problemas costuma-se utilizar o erro quadrático médio (EQM) ou mean squared error (MSE) em inglês. Existem muitas outras funções de erro, mas por enquanto isso não vem ao caso, então fique com essa e aprenderemos mais funções adiante.
Na literatura, esse erro geralmente é chamado de função de perda ou loss function, portanto, a partir de agora iremos chamá-lo assim.
O erro quadrático médio (EQM) mede a distância entre os pontos previstos por nosso neurônio e os valores reais de z, daí a palavra *erro* em seu nome.
≤ft(zp-z\right)
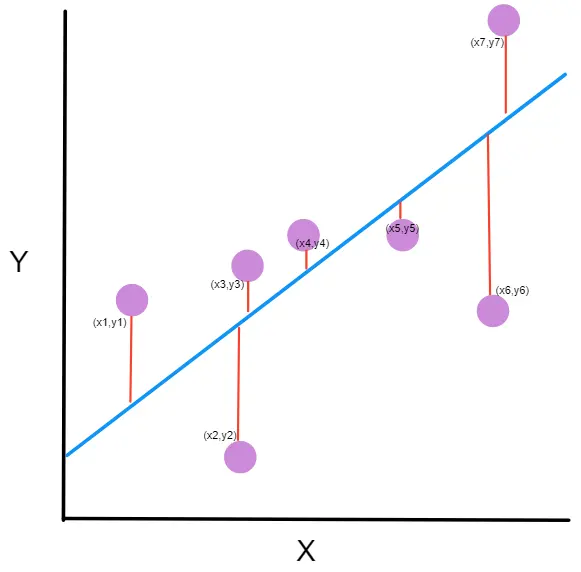
No entanto, às vezes essa distância será positiva e às vezes negativa, dependendo se se toma primeiro o valor previsto pelo nosso neurônio ou o valor de z, por isso essa distância é elevada ao quadrado, daí a palavra *quadrático* no nome.
≤ft(zp-z\right)2
Por fim, somam-se todas as distâncias elevadas ao quadrado e divide-se pelo número de amostras, ou seja, faz-se uma média de todo dia, daí a palavra *média* no nome.
loss = ∑i=1N ≤ft(zp-z\right)2N
Já temos a maneira de calcular o ECM (erro quadrático médio).
No nosso caso, nossa perda é
def loss(z, z_p):n = len(z)loss = np.sum((z_p-z) ** 2) / nreturn lossCopied
error = loss(z, z_p)errorCopied
103.72263739946467
Embora isso não nos diga muito, é preciso lembrar que estamos buscando o mínimo da função de erro, portanto devemos procurar um valor próximo de 0.
Vejamos como a função de perda (loss) muda em função do valor de ```a
```
posibles_a = np.linspace(0, 4, 30)perdidas = np.empty_like(posibles_a)for i in range (30):z_p = posibles_a[i]*xperdidas[i] = loss(z, z_p)plt.plot(posibles_a, perdidas)plt.xlabel('a')plt.ylabel('loss ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
Podemos ver que o erro ou perda é menor quando a vale em torno de 2. Você poderia pensar, pronto, problema resolvido, e é verdade. Mas, como te disse, íamos começar com o problema mais simples, então olhando um gráfico podemos resolver.
Se o problema tivesse 2 parâmetros, poderíamos analisar um gráfico de 3 dimensões para buscar o mínimo.
Mas assim que o nosso problema tivesse mais de 2 parâmetros já não poderíamos buscar o erro mínimo com um gráfico. Sem falar que as redes neurais têm milhões de parâmetros, por exemplo, a rede neural resnet18 (que estudaremos mais adiante) é uma rede pequena e tem cerca de 11 milhões de parâmetros. É impossível buscar o erro mínimo aí de maneira manual. Portanto, precisamos de um método automático por meio de cálculos.
Descida do gradiente
Como dissemos, precisamos encontrar o valor de a que faça com que a função de perda seja mínima e, ao mesmo tempo, fazê-lo por meio de um algoritmo.
Uma das peculiaridades de um mínimo de uma função é que seu gradiente ou derivada é 0.
Se você não sabe o que é a derivada ou gradiente, a derivada de uma função em um ponto representa a inclinação da reta tangente à função nesse ponto.
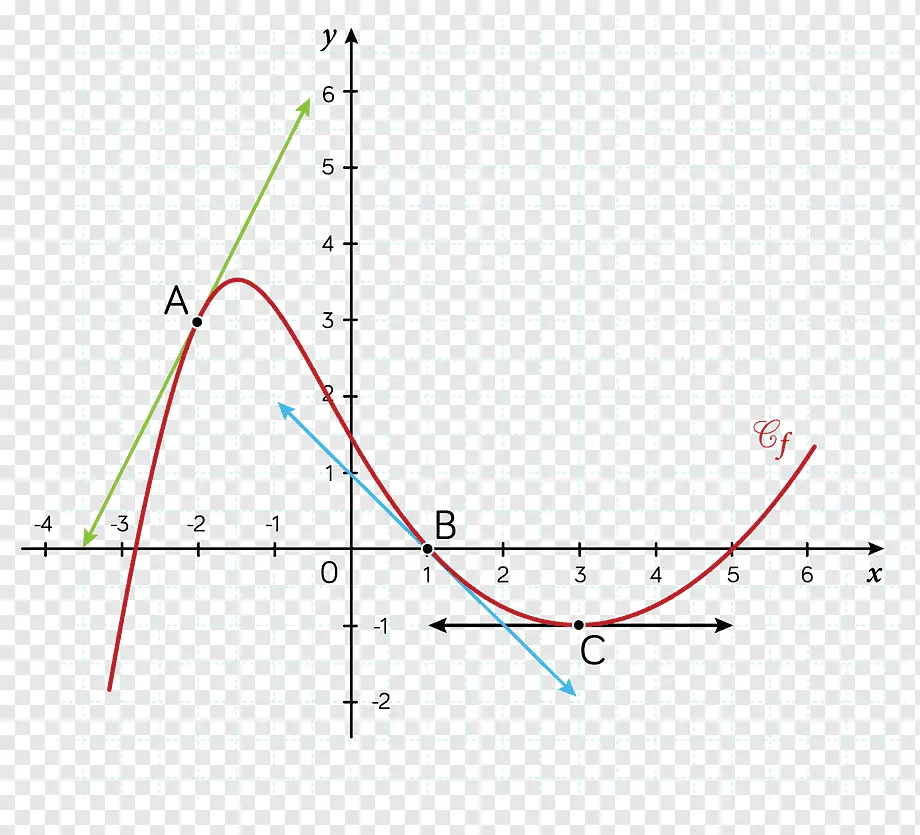
Por exemplo, nesta imagem, a derivada de A, B e C são as linhas verde, azul e preta, respectivamente
A derivada mede a inclinação de uma função; quanto mais inclinada a função em um ponto, mais perpendicular ao *eixo x* será a derivada nesse ponto, e quanto menos inclinada a função em um ponto, mais paralela ao *eixo x* será a derivada nesse ponto.
Como se calcula o gradiente da função de perda em relação a a? A função de perda tínhamos dito que era.
loss = ∑i=1N ≤ft(zp-z\right)2N
Pois bem, se a derivarmos em relação a a temos
\partial loss\partial a = \partial ≤ft(∑i=1N ≤ft(zp-z\right)2N\right)\partial a = \partial ≤ft(∑i=1N ≤ft(ax-z\right)2N\right)\partial a = 2N∑i=1N {≤ft(ax-z\right) x} = 2N∑i=1N {≤ft(zp-z\right) x}
Se voltarmos a ver o gráfico da função de perda em relação ao valor de a, quanto maior for a inclinação da função, ou seja, quanto maior for a derivada, mais longe estaremos do mínimo. E quanto menor for a derivada, menor inclinação, mais perto estaremos do mínimo.
def gradiente (a, x, z):# Función que calcula el valor de una derivada en un punton = len(z)return 2*np.sum((a*x - z)*x)/nCopied
def gradiente_linea (i, a=None, error=None, gradiente=None):# Función que devuleve los puntos de la linea que supone la derivada de una# función en un punto dadoif a is None:x1 = posibles_a[i]-0.7x2 = posibles_a[i]x3 = posibles_a[i]+0.7b = perdidas[i] - gradientes[i]*posibles_a[i]z1 = gradientes[i]*x1 + bz2 = perdidas[i]z3 = gradientes[i]*x3 + belse:x1 = a-0.7x2 = ax3 = a+0.7b = error - gradiente*az1 = gradiente*x1 + bz2 = errorz3 = gradiente*x3 + bx_linea = np.array([x1, x2, x3])z_linea = np.array([z1, z2, z3])return x_linea, z_lineaCopied
posibles_a = np.linspace(0, 4, 30)perdidas = np.empty_like(posibles_a)gradientes = np.empty_like(posibles_a)for i in range (30):z_p = posibles_a[i]*xperdidas[i] = loss(z, z_p)gradientes[i] = gradiente(posibles_a[i], x, z) # Estos son los valores de las derivadas en cada valor de a# es decir, nos da el valor de la pendiente de la recta tangente# a la curva# Se calcula la linea del gradiente en el inicioi_inicio = 3x_inicio, z_inicio = gradiente_linea(i_inicio)# Se calcula la linea del gradiente en la basei_base = 14x_base, z_base = gradiente_linea (i_base)# Se calcula la linea del gradiente al finali_final = -3x_final, z_final = gradiente_linea (i_final)# Se dibuja el error en función de aplt.plot(posibles_a, perdidas, linewidth = 3)# Se dibuja la derivada al inicioplt.plot(x_inicio, z_inicio, 'g')plt.scatter(posibles_a[i_inicio], perdidas[i_inicio], c='green')# Se dibuja la derivada en el medioplt.plot(x_base, z_base, 'y')plt.scatter(posibles_a[i_base], perdidas[i_base], c='pink')# Se dibuja la derivada al finalplt.plot(x_final, z_final, 'r')plt.scatter(posibles_a[i_final], perdidas[i_final], c='red')plt.xlabel('a')plt.ylabel('loss ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
Como pode-se ver, no início do gráfico, estamos longe do mínimo, por isso a derivada da função (linha verde) é muito íngreme, assim como no final da função (linha vermelha). No entanto, quando estamos perto do mínimo a derivada é pequena (linha amarela).
Lembre-se, o que queremos é modificar o valor de a para que a função de custo seja mínima. Isso significa que o erro em todos os pares (x, z) será o menor possível. Pois bem, já temos uma maneira de saber o quão longe ou perto estamos desse mínimo. Agora precisamos saber como modificar a para que esteja na região de mínimo custo.
A forma de fazer isso é através do **descenso do gradiente** ou **gradient descent** em inglês. O que vamos fazer é modificar o valor de a em função do valor do gradiente.
a' = a - α\partial loss\partial a
Como pode-se ver, de a subtrai-se a derivada da função de perda multiplicada por α, que é conhecida como **taxa de aprendizado** ou **learning rate** em inglês. Vamos ver isso por partes.
Primeiro, de a se subtrai a derivada da função de perda, vejamos por quê. Suponhamos que estamos no primeiro ponto da função de custo (o da linha verde), como vimos sua derivada tem uma grande inclinação, mas além disso ela é negativa (pois se nos deslocamos da esquerda para a direita a derivada vai para baixo), então se de a subtraímos um valor negativo, na verdade o que estamos fazendo é somar um valor a ele, ou seja, estamos fazendo com que a seja maior, aproximando-o assim da zona do mínimo.
Agora ao contrário, suponha que estamos no último ponto (o da linha vermelha), nesse ponto a derivada tem uma grande inclinação, mas além disso é positiva (já que se nos deslocamos da esquerda para a direita a derivada vai para cima). Nesse ponto, portanto, estamos subtraindo de a um número positivo, ou seja, estamos tornando a menor, estamos aproximando-a da região do mínimo.
Vamos ver agora o que significa o **learning rate** α.
Este é um fator de aprendizado que nós escolhemos, ou seja, estamos configurando com que velocidade a irá se mover. Ou seja, estamos configurando a taxa de aprendizado da rede neural. Quanto maior for α, mais rápido a rede irá aprender, enquanto quanto menor, mais lentamente ela irá aprender.
Mais adiante, estudaremos o que acontece ao mudar o valor de α, mas por enquanto lembre-se de que valores típicos de α estão entre 10-3 e 10-4.
Loop de treinamento
Já temos uma maneira de saber o erro que o valor escolhido de a nos introduz e uma fórmula para modificar o valor de a. Agora só falta repetir este loop várias vezes até chegarmos ao mínimo da função de custo.
lr = 10**-3 # Tasa de aprendizaje o learning ratesteps = 100 # Numero de veces que se realiza el bucle de enrtenamiento# Matrices donde se guardarán los datos para luego ver la evolución del entrenamiento en una gráficaZs = np.empty([steps, len(x)])Xs_linea_gradiente = np.empty([steps, len(x_inicio)])Zs_linea_gradiente = np.empty([steps, len(z_inicio)])As = np.empty(steps)Errores = np.empty(steps)for i in range(steps):# Calculamos el gradientedl = gradiente(a, x, z)# Corregimos el valor de aa = a - lr*dl# Calculamos los valores que obtiene la red neuronalz_p = a*x# Obtenemos el errorerror = loss(z_p, z)# Obtenemos las rectas de los gradientes para representarlasx_linea_gradiente, z_linea_gradiente = gradiente_linea(i_inicio, a=a, error=error, gradiente=dl)# Guardamos los valores para luego ver la evolución del entrenamiento en una gráficaAs[i] = aZs[i,:] = z_pErrores[i] = errorXs_linea_gradiente[i,:] = x_linea_gradienteZs_linea_gradiente[i,:] = z_linea_gradiente# Imprimimos la evolución del entrenamientoif (i+1)%10 == 0:print(f"i={i+1}: error={error}, gradiente={dl}, a={a}")Copied
i=10: error=28.075728775043547, gradiente=-61.98100236918255, a=1.1394358551489718i=20: error=9.50524503591466, gradiente=-30.709631939506394, a=1.569284692740735i=30: error=4.946395605365449, gradiente=-15.215654116766258, a=1.7822612353503635i=40: error=3.8272482302958437, gradiente=-7.5388767490642445, a=1.887784395436304i=50: error=3.552509863476323, gradiente=-3.7352756707945205, a=1.9400677933076504i=60: error=3.4850646173147437, gradiente=-1.8507112931062708, a=1.9659725680580205i=70: error=3.4685075514689503, gradiente=-0.9169690786711168, a=1.978807566971417i=80: error=3.464442973977972, gradiente=-0.4543292594425819, a=1.9851669041474533i=90: error=3.4634451649256888, gradiente=-0.22510581958202128, a=1.9883177551597053i=100: error=3.463200213782052, gradiente=-0.111532834297016, a=1.989878902465877
Vamos representar em um gráfico a evolução do treinamento
# Creamos GIF con la evolución del entrenamientofrom matplotlib.animation import FuncAnimationfrom IPython.display import display, Image# Creamos la gráfica inicialfig, (ax1, ax2) = plt.subplots(1,2)fig.set_tight_layout(True)ax1.set_xlabel('X')ax1.set_ylabel('Z ', rotation=0)ax2.set_xlabel('a')ax2.set_ylabel('loss ', rotation=0)# Se dibujan los datos que persistiran en toda la evolución de la gráficaax1.scatter(x, z)ax2.plot(posibles_a, perdidas, linewidth = 3)# Se dibuja el resto de lineas que irán cambiando durante el entrenamientoline1, = ax1.plot(x, Zs[0,:], 'k', linewidth=2) # Recta generada con la pendiente a aprendidaline2, = ax2.plot(Xs_linea_gradiente[0,:], Zs_linea_gradiente[0,:], 'g') # Gradiente de la función de errorpunto2, = ax2.plot(As[0], Errores[0], 'r*') # Punto donde se calcula el gradiente# Se dibujan textos dentro de la segunda figura del subplotfontsize = 12a_text = ax2.text(1, 150, f'a = {As[0]:.2f}', fontsize = fontsize)error_text = ax2.text(1, 125, f'loss = {Errores[0]:.2f}', fontsize = fontsize)# Se dibuja un títulotitulo = fig.suptitle(f'step: {0}', fontsize=fontsize)# Se define la función que va a modificar la gráfica con la evolución del entrenamientodef update(i):# Se actualiza la linea 1. Recta generada con la pendiente a aprendidaline1.set_ydata(Zs[i,:])# Se actualiza la linea 2. Gradiente de la función de errorline2.set_xdata(Xs_linea_gradiente[i,:])line2.set_ydata(Zs_linea_gradiente[i,:])# Se actualiza el punto 2. Punto donde se calcula el gradientepunto2.set_xdata([As[i]])punto2.set_ydata([Errores[i]])# Se actualizan los textosa_text.set_text(f'a = {As[i]:.2f}')error_text.set_text(f'loss = {Errores[i]:.2f}')titulo.set_text(f'step: {i}')return line1, ax1, line2, punto2, ax2, a_text, error_text# Se crea la animación con un refresco cada 200 msinterval = 200 # msanim = FuncAnimation(fig, update, frames=np.arange(0, steps), interval=interval)# Se guarda la animación en un gifgif_name = "GIFs/entrenamiento_regresion.gif"anim.save(gif_name, dpi=80, writer='pillow')# Leer el GIF y mostrarlowith open(gif_name, 'rb') as f:display(Image(data=f.read()))# Se elimina la figura para que no se muestre en el notebookplt.close()Copied
<IPython.core.display.Image object>
Vamos explicar o processo novamente, mas sem nos deter tanto em cada detalhe para reforçar os conceitos.
Temos os seguintes valores x e y
x = np.array( [ 0. , 0.34482759, 0.68965517, 1.03448276, 1.37931034,1.72413793, 2.06896552, 2.4137931 , 2.75862069, 3.10344828,3.44827586, 3.79310345, 4.13793103, 4.48275862, 4.82758621,5.17241379, 5.51724138, 5.86206897, 6.20689655, 6.55172414,6.89655172, 7.24137931, 7.5862069 , 7.93103448, 8.27586207,8.62068966, 8.96551724, 9.31034483, 9.65517241, 10. ])z = np.array( [-0.16281253, 1.88707606, 0.39649312, 0.03857752, 4.0148778 ,0.58866234, 3.35711859, 1.94314906, 6.96106424, 5.89792585,8.47226615, 3.67698542, 12.05958678, 9.85234481, 9.82181679,6.07652248, 14.17536744, 12.67825433, 12.97499286, 11.76098542,12.7843083 , 16.42241036, 13.67913705, 15.55066478, 17.45979602,16.41982806, 17.01977617, 20.28151197, 19.38148414, 19.41029831])plt.scatter(x, z)plt.xlabel('X')plt.ylabel('Z ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
Assim, usamos um único neurônio para tentar encontrar a reta que melhor se adapta a esses pontos.
Só precisamos encontrar o melhor valor possível de a
Começamos inicializando a com um valor aleatório
random.seed(45)a = random.random()aCopied
0.2718754143840908
Calculamos os valores z que a neurônio gera com o valor de a que acabamos de inicializar.
z_p = a*xplt.scatter(x, z)plt.plot(x, z_p, 'k')plt.xlabel('X')plt.ylabel('Z ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
Mas vemos que, com o valor de a que estabelecemos, o neurônio não é capaz de se assemelhar aos pontos.
Precisamos saber quão bom ou ruim é o valor de a, de modo que calculamos o erro da saída do neurônio em relação aos dados que temos. Para isso usamos o erro quadrático médio (EQM) ou mean squared error (MSE) através da fórmula
loss = ∑i=1N ≤ft(zp-z\right)2N
Neste momento, nosso erro é
error = loss(z, z_p)errorCopied
103.72263739946467
Como já temos uma maneira de medir o erro, queremos diminuir o erro, de modo que buscamos que o gradiente do erro em relação a a seja zero, ou o mais próximo possível de zero. Para isso, fazemos um loop de treinamento no qual modificamos o valor de a através da fórmula
a' = a - α\partial loss\partial a
Onde α é denominado taxa de aprendizado ou learning rate e determina a velocidade de aprendizado.
lr = 10**-3 # Tasa de aprendizaje o learning ratesteps = 100 # Numero de veces que se realiza el bucle de enrtenamiento# Matrices donde se guardarán los datos para luego ver la evolución del entrenamiento en una gráficaZs = np.empty([steps, len(x)])Xs_linea_gradiente = np.empty([steps, len(x_inicio)])Zs_linea_gradiente = np.empty([steps, len(z_inicio)])As = np.empty(steps)Errores = np.empty(steps)for i in range(steps):# Calculamos el gradientedl = gradiente(a, x, z)# Corregimos el valor de aa = a - lr*dl# Calculamos los valores que obtiene la red neuronalz_p = a*x# Obtenemos el errorerror = loss(z, z_p)# Obtenemos las rectas de los gradientes para representarlasx_linea_gradiente, z_linea_gradiente = gradiente_linea(i_inicio, a=a, error=error, gradiente=dl)# Guardamos los valores para luego ver la evolución del entrenamiento en una gráficaAs[i] = aZs[i,:] = z_pErrores[i] = errorXs_linea_gradiente[i,:] = x_linea_gradienteZs_linea_gradiente[i,:] = z_linea_gradiente# Imprimimos la evolución del entrenamientoif (i+1)%10 == 0:print(f"i={i+1}: error={error}, gradiente={dl}, a={a}")Copied
i=10: error=28.075728775043547, gradiente=-61.98100236918255, a=1.1394358551489718i=20: error=9.50524503591466, gradiente=-30.709631939506394, a=1.569284692740735i=30: error=4.946395605365449, gradiente=-15.215654116766258, a=1.7822612353503635i=40: error=3.8272482302958437, gradiente=-7.5388767490642445, a=1.887784395436304i=50: error=3.552509863476323, gradiente=-3.7352756707945205, a=1.9400677933076504i=60: error=3.4850646173147437, gradiente=-1.8507112931062708, a=1.9659725680580205i=70: error=3.4685075514689503, gradiente=-0.9169690786711168, a=1.978807566971417i=80: error=3.464442973977972, gradiente=-0.4543292594425819, a=1.9851669041474533i=90: error=3.4634451649256888, gradiente=-0.22510581958202128, a=1.9883177551597053i=100: error=3.463200213782052, gradiente=-0.111532834297016, a=1.989878902465877
Vemos que o erro diminuiu consideravelmente, de 103,72 que tínhamos inicialmente para 3,46 que temos agora.
Representamos a evolução do treinamento para vê-la graficamente