CSS Tutorial: Flexbox, Grid & Web Design
Complete CSS guide covering selectors, properties, box model, layout, colors, and fonts. Practical examples for beginners and intermediate web developers.
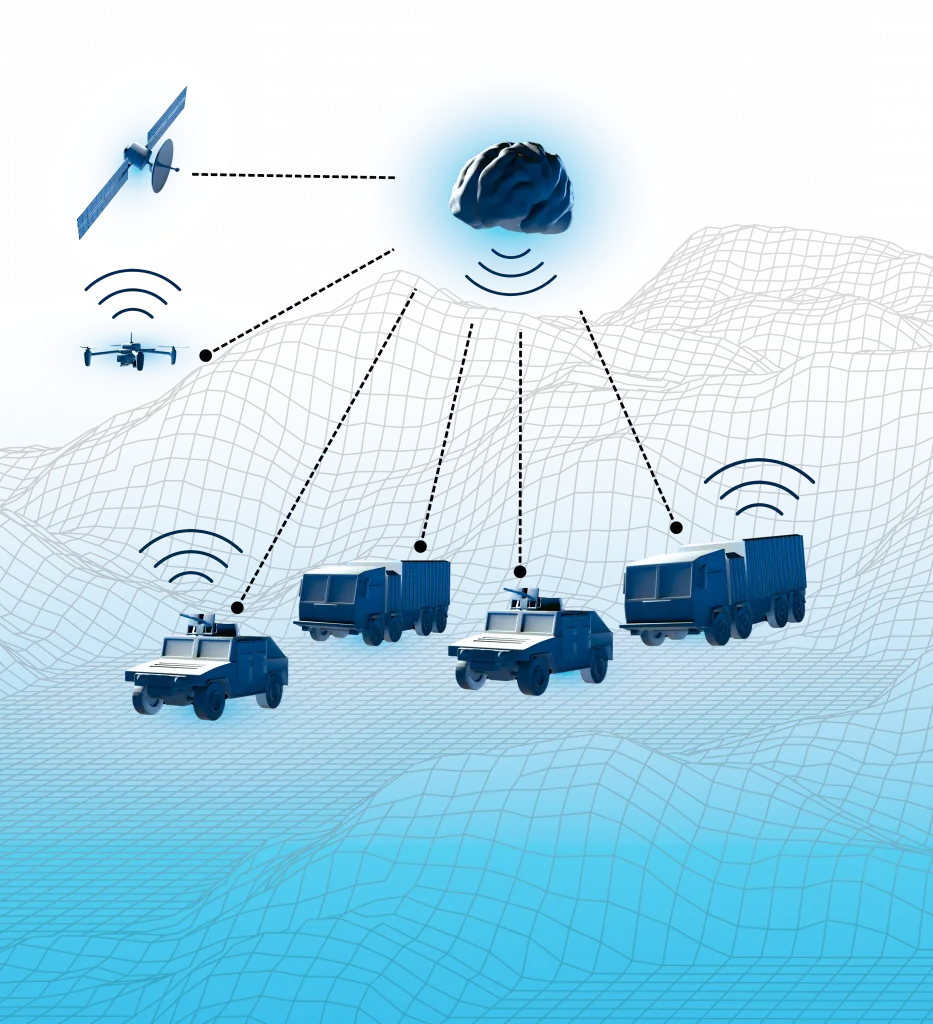
Perception system based solely on cameras, eliminating the dependency on LIDAR and RADAR for reasons of cost, stealth and computational efficiency.
For environment detection, three types of neural networks are used:
Classifies each pixel of the image into its corresponding class, generating a segmentation mask.

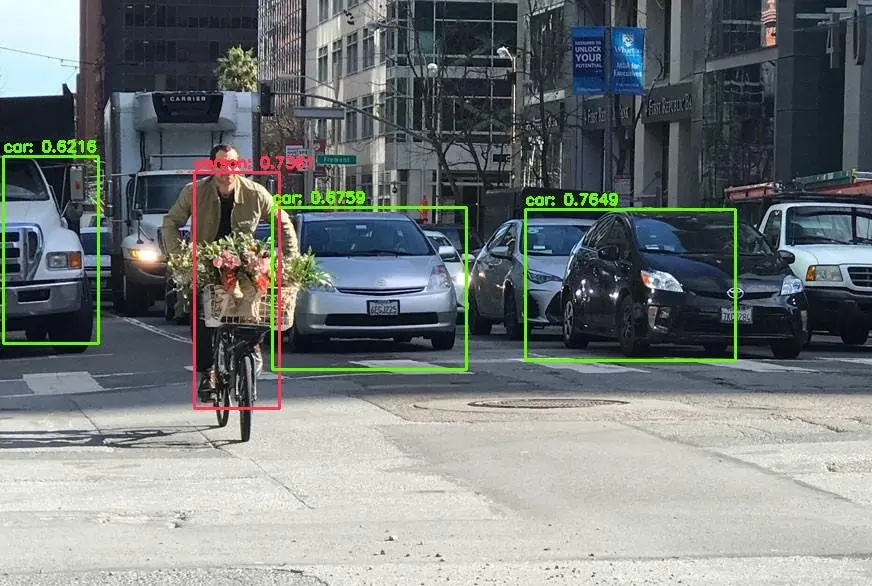
Detects and classifies objects in the image with bounding boxes.
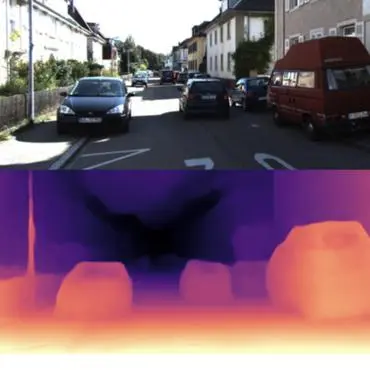
Estimates the distance of each pixel, allowing to know how far each object is.
Pre-trained networks did not work for unstructured environments, so it was necessary to train our own segmentation and classification networks.
From hours of field test videos, a heterogeneous dataset was created:

Neural network optimization for real-time execution on the Jetson Orin embedded device. I achieved up to a 40% improvement in inference speed.


Complete CSS guide covering selectors, properties, box model, layout, colors, and fonts. Practical examples for beginners and intermediate web developers.

Third and final part of the Deep Research with LangGraph series. Implement the Writer agent that drafts the final report...
Second part of the Deep Research with LangGraph series. Build the Research Supervisor that coordinates several Researche...


Let's talk.
maximofn@gmail.com
Machine Learning and AI specialist. I develop solutions with generative AI, intelligent agents and custom models.
AI agents, powered by LLMs, promise to transform applications. But are they simple executors today or future intelligent collaborators? To reach their...

Learn to create an IA system to execute efficiently on a device
Hugging Face spaces allow us to run models with very simple demos, but what if the demo breaks? Or if the user deletes it? That's why I've created docker containers with some interesting spaces, to be able to use them locally, whatever happens. In fact, if you click on any project view button, it may take you to a space that doesn't work.




Let's talk.
maximofn@gmail.com
Machine Learning and AI specialist. I develop solutions with generative AI, intelligent agents and custom models.
Dataset with jokes in English
Use: Fine-tuning text generation models for humor
Dataset with translations from English to Spanish
Use: Training English-Spanish translation models
Dataset with Netflix movies and series
Use: Netflix catalog analysis and recommendation systems