Como hemos dicho, una neurona es una unidad de procesamiento, recibe unas señales, realiza unos cálculos y saca otra señal.
Así que vamos a ver el ejemplo más sencillo, el caso en el que se recibe una señal y se saca otra, y lo vamos a ver con la regresión lineal.
Supongamos que hemos hecho unas mediciones y obtenemos los siguientes puntos
import numpy as npx = np.array( [ 0. , 0.34482759, 0.68965517, 1.03448276, 1.37931034,1.72413793, 2.06896552, 2.4137931 , 2.75862069, 3.10344828,3.44827586, 3.79310345, 4.13793103, 4.48275862, 4.82758621,5.17241379, 5.51724138, 5.86206897, 6.20689655, 6.55172414,6.89655172, 7.24137931, 7.5862069 , 7.93103448, 8.27586207,8.62068966, 8.96551724, 9.31034483, 9.65517241, 10. ])z = np.array( [-0.16281253, 1.88707606, 0.39649312, 0.03857752, 4.0148778 ,0.58866234, 3.35711859, 1.94314906, 6.96106424, 5.89792585,8.47226615, 3.67698542, 12.05958678, 9.85234481, 9.82181679,6.07652248, 14.17536744, 12.67825433, 12.97499286, 11.76098542,12.7843083 , 16.42241036, 13.67913705, 15.55066478, 17.45979602,16.41982806, 17.01977617, 20.28151197, 19.38148414, 19.41029831])Copied
import matplotlib.pyplot as pltplt.scatter(x, z)plt.xlabel('X')plt.ylabel('Z ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
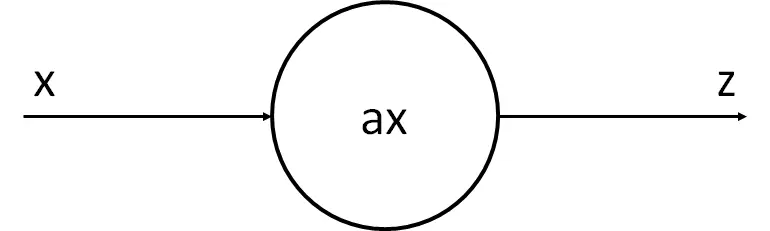
Como vemos esto se puede asemejar a una regresión lineal. Es decir, podemos suponer que la neurona recibe x, lo multiplica por un número y saca z
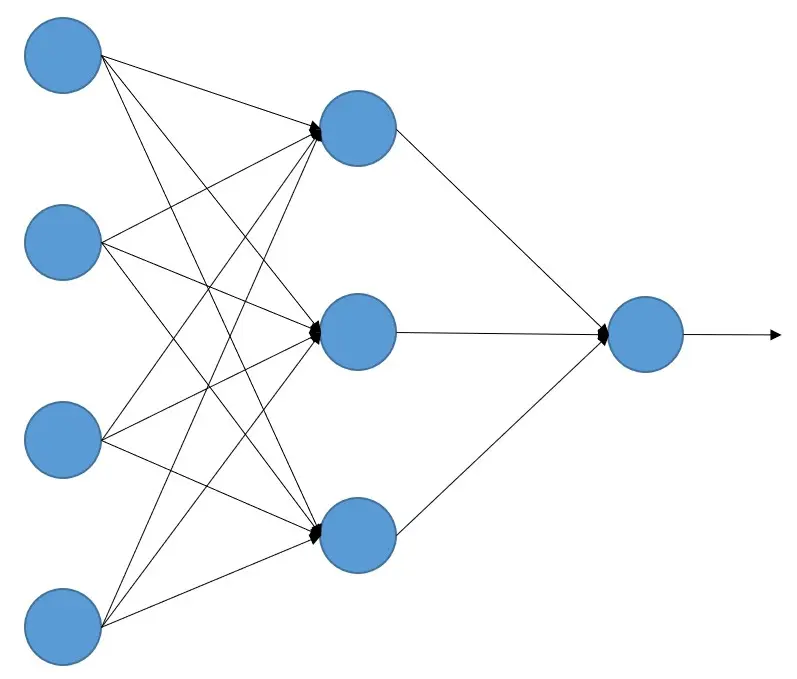
A partir de aquí vamos a mostrar cómo funcionan las redes neuronales, sólo que con un ejemplo sencillo de una sola neurona, luego iremos mostrando ejemplos cada vez más complejos, hasta que explicaremos el funcionamiento general de las redes neuronales. Pero si entiendes lo que va a pasar a continuación vas a entender las redes neuronales.
Nuestra neurona tiene el parámetro a, que es el que queremos cambiar para que la recta que va a generar se asemeje lo máximo posible a los puntos. El proceso de aprendizaje de nuestra neurona va a consistir en, mediante unos cuantos cálculos, determinar el mejor valor posible de a
Inicialización aleatoria del parámetro
Este ejemplo es sencillo, pero cuando tenemos redes neuronales complejas y no sabemos qué valores tienen que tener sus parámetros, lo que se hace es inicializarlos aleatoriamente
import randomrandom.seed(45) # Esto es una semilla, cuando se generan números aleatorios,# pero queremos que siempre se genere el mismo se suele fijar# un número llamado semilla. Esto hace que siempre a sea el mismoa = random.random()aCopied
0.2718754143840908
El valor de a es 0.271875, veamos qué recta saldría si paráramos ahora
z_p = a*xplt.scatter(x, z)plt.plot(x, z_p, 'k')plt.xlabel('X')plt.ylabel('Z ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
Como vemos, no se parece en nada, así que vamos a tener que hacer que nuestra neurona *aprenda*
Cálculo del error o loss
Para buscar el mejor valor posible de a queremos encontrar un valor que haga que los valores predichos por nuestra neurona tengan el menor error posible con los valores reales de z.
En este tipo de problemas se suele utilizar el error cuadrático medio (ECM) o mean squared error (MSE) en inglés. Hay muchas más funciones de error, pero de momento no vienen al caso, así que quédate con esta y ya aprenderemos más funciones más adelante.
En la literatura a este error se le suele llamar función de pérdida o loss function, por lo que a partir de ahora lo llamaremos así.
El error cuadrático medio (ECM) mide la distancia entre los puntos predichos por nuestra neurona y los valores reales de z, de ahí la palabra *error* dentro de su nombre.
≤ft(zp-z\right)
Sin embargo, a veces esa distancia va a ser positiva y a veces negativa, según si se toma primero el valor predicho por nuestra neurona o el valor de z, por lo que dicha distancia se eleva al cuadrado, de ahí la palabra *cuadrático* del nombre.
≤ft(zp-z\right)2
Por último, se suman todas las distancias elevadas al cuadrado y se divide entre el número de muestras, vamos, lo que es hacer una media de toda la vida, de ahí la palabra *medio* del nombre.
loss = ∑i=1N ≤ft(zp-z\right)2N
Ya tenemos la manera de calcular el ECM (error cuadrático medio).
En nuestro caso, nuestra pérdida es
def loss(z, z_p):n = len(z)loss = np.sum((z_p-z) ** 2) / nreturn lossCopied
error = loss(z, z_p)errorCopied
103.72263739946467
Aunque esto no nos dice mucho, hay que recordar que buscamos el mínimo de la función de error, por lo que deberíamos buscar un valor cercano a 0.
Veamos cómo cambia la función de pérdida (loss) en función del valor de <code>a</code>
posibles_a = np.linspace(0, 4, 30)perdidas = np.empty_like(posibles_a)for i in range (30):z_p = posibles_a[i]*xperdidas[i] = loss(z, z_p)plt.plot(posibles_a, perdidas)plt.xlabel('a')plt.ylabel('loss ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
Podemos ver que el error o pérdida es menor cuando a vale en torno a 2. Podrías pensar, ya está, problema solucionado, y es cierto. Pero como te dije, íbamos a empezar con el problema más sencillo, por lo que mirando una gráfica lo podemos solucionar.
Si el problema tuviese 2 parámetros, podríamos revisar un gráfico de 3 dimensiones para buscar el mínimo
Pero en cuanto nuestro problema tuviese más de 2 parámetros ya no podríamos buscar el mínimo error con una gráfica. Por no decir que las redes neuronales tienen millones de parámetros, por ejemplo, la red neuronal resnet18 (que más tarde la estudiaremos) es una red pequeña y tiene en torno a 11 millones de parámetros. Es imposible buscar el mínimo error ahí de manera manual. De modo que necesitamos un método automático mediante cálculos.
Descenso del gradiente
Como hemos dicho, necesitamos encontrar el valor de a que haga que la función de pérdida sea mínima y, a su vez, hacerlo mediante un algoritmo.
Una de las peculiaridades de un mínimo de una función es que su gradiente o derivada es 0.
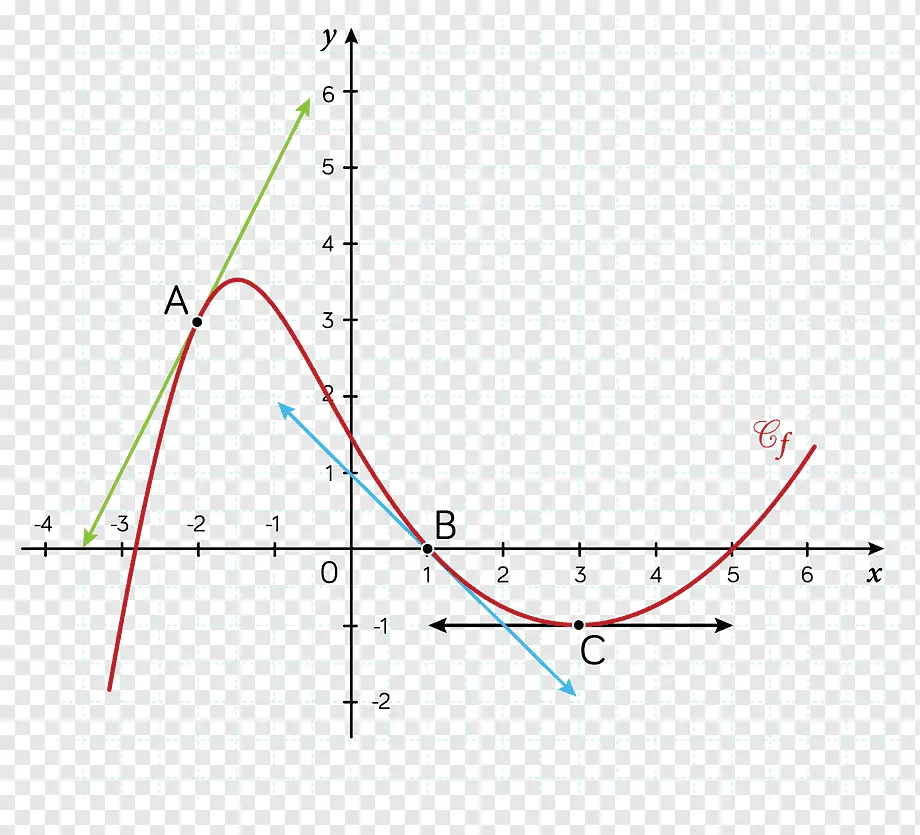
Si no sabes lo que es la derivada o gradiente, la derivada de una función en un punto representa la pendiente de la recta tangente a la función en ese punto.
Por ejemplo, en esta imagen, la derivada de A, B y C son las líneas verde, azul y negra respectivamente
La derivada mide la pendiente de una función; cuanto más pendiente tiene la función en un punto, más perpendicular al *eje x* será la derivada en ese punto, y cuanto menos pendiente tiene la función en un punto, más paralela al *eje x* será la derivada en ese punto.
¿Cómo se calcula el gradiente de la función de pérdida con respecto a a? La función de pérdida habíamos dicho que era.
loss = ∑i=1N ≤ft(zp-z\right)2N
Pues bien, si la derivamos con respecto a a nos queda
\partial loss\partial a = \partial ≤ft(∑i=1N ≤ft(zp-z\right)2N\right)\partial a = \partial ≤ft(∑i=1N ≤ft(ax-z\right)2N\right)\partial a = 2N∑i=1N {≤ft(ax-z\right) x} = 2N∑i=1N {≤ft(zp-z\right) x}
Si volvemos a ver la gráfica de la función de pérdida con respecto al valor de a, cuanto mayor pendiente tenga la función, es decir, cuanto mayor sea la derivada, más lejos estaremos del mínimo. Y cuanto menor sea la derivada, menor pendiente, más cerca estaremos del mínimo.
def gradiente (a, x, z):# Función que calcula el valor de una derivada en un punton = len(z)return 2*np.sum((a*x - z)*x)/nCopied
def gradiente_linea (i, a=None, error=None, gradiente=None):# Función que devuleve los puntos de la linea que supone la derivada de una# función en un punto dadoif a is None:x1 = posibles_a[i]-0.7x2 = posibles_a[i]x3 = posibles_a[i]+0.7b = perdidas[i] - gradientes[i]*posibles_a[i]z1 = gradientes[i]*x1 + bz2 = perdidas[i]z3 = gradientes[i]*x3 + belse:x1 = a-0.7x2 = ax3 = a+0.7b = error - gradiente*az1 = gradiente*x1 + bz2 = errorz3 = gradiente*x3 + bx_linea = np.array([x1, x2, x3])z_linea = np.array([z1, z2, z3])return x_linea, z_lineaCopied
posibles_a = np.linspace(0, 4, 30)perdidas = np.empty_like(posibles_a)gradientes = np.empty_like(posibles_a)for i in range (30):z_p = posibles_a[i]*xperdidas[i] = loss(z, z_p)gradientes[i] = gradiente(posibles_a[i], x, z) # Estos son los valores de las derivadas en cada valor de a# es decir, nos da el valor de la pendiente de la recta tangente# a la curva# Se calcula la linea del gradiente en el inicioi_inicio = 3x_inicio, z_inicio = gradiente_linea(i_inicio)# Se calcula la linea del gradiente en la basei_base = 14x_base, z_base = gradiente_linea (i_base)# Se calcula la linea del gradiente al finali_final = -3x_final, z_final = gradiente_linea (i_final)# Se dibuja el error en función de aplt.plot(posibles_a, perdidas, linewidth = 3)# Se dibuja la derivada al inicioplt.plot(x_inicio, z_inicio, 'g')plt.scatter(posibles_a[i_inicio], perdidas[i_inicio], c='green')# Se dibuja la derivada en el medioplt.plot(x_base, z_base, 'y')plt.scatter(posibles_a[i_base], perdidas[i_base], c='pink')# Se dibuja la derivada al finalplt.plot(x_final, z_final, 'r')plt.scatter(posibles_a[i_final], perdidas[i_final], c='red')plt.xlabel('a')plt.ylabel('loss ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
Como se puede ver, al inicio de la gráfica, estamos lejos del mínimo, por lo que la derivada de la función (línea verde) es muy empinada, igual que al final de la función (línea roja). Sin embargo, cuando estamos cerca del mínimo la derivada es pequeña (línea amarilla).
Recordatorio, lo que queremos es modificar el valor de a que haga que la función de costo sea mínima. Esto supone que el error en todos los pares (x, z) va a ser el menor posible. Pues bien, ya tenemos una manera de saber cuán lejos o cerca estamos de ese mínimo. Ahora necesitamos saber cómo modificar a para hacer que esté en la zona de mínimo costo.
La forma de hacer esto es mediante el **descenso del gradiente** o **gradient descent** en inglés. Lo que vamos a hacer es modificar el valor de a en función del valor del gradiente.
a' = a - α\partial loss\partial a
Como se puede ver, a a se le resta la derivada de la función de pérdida multiplicada por α, que se conoce como **tasa de aprendizaje** o **learning rate** en inglés. Vamos a ver esto por partes.
Primero, a a se le resta la derivada de la función de pérdida, veamos por qué. Supongamos que estamos en el primer punto de la función de coste (el de la línea verde), como hemos visto su derivada tiene una gran pendiente, pero además esta es negativa (ya que si nos desplazamos de izquierda a derecha la derivada va hacia abajo), por lo que si a a se le resta un valor negativo, en realidad lo que estamos haciendo es sumarle un valor, es decir, estamos haciendo que a sea mayor, por lo que lo estamos acercando a la zona del mínimo.
Ahora al revés, supongamos que estamos en el último punto (el de la línea roja), en ese punto la derivada tiene una gran pendiente, pero además es positiva (ya que si nos desplazamos de izquierda a derecha la derivada va hacia arriba). En ese punto por tanto estamos restando a a un número positivo, es decir, estamos haciendo a a más pequeña, la estamos acercando a la zona del mínimo.
Veamos ahora qué significa el **learning rate** α.
Este es un factor de aprendizaje que nosotros elegimos, es decir, estamos configurando con qué velocidad se moverá a. Es decir, estamos configurando la velocidad de aprendizaje de la red neuronal. Cuanto más grande sea α, más rápido aprenderá la red, mientras que cuanto más pequeño, más lento aprenderá.
Más adelante estudiaremos qué ocurre al cambiar el valor de α, pero de momento quédate con que valores típicos de α son entre 10-3 y 10-4.
Bucle de entrenamiento
Ya tenemos una manera de saber el error que nos introduce el valor de a elegido y una fórmula para modificar el valor de a. Ya solo hace falta repetir este bucle varias veces hasta que lleguemos al mínimo de la función de coste.
lr = 10**-3 # Tasa de aprendizaje o learning ratesteps = 100 # Numero de veces que se realiza el bucle de enrtenamiento# Matrices donde se guardarán los datos para luego ver la evolución del entrenamiento en una gráficaZs = np.empty([steps, len(x)])Xs_linea_gradiente = np.empty([steps, len(x_inicio)])Zs_linea_gradiente = np.empty([steps, len(z_inicio)])As = np.empty(steps)Errores = np.empty(steps)for i in range(steps):# Calculamos el gradientedl = gradiente(a, x, z)# Corregimos el valor de aa = a - lr*dl# Calculamos los valores que obtiene la red neuronalz_p = a*x# Obtenemos el errorerror = loss(z_p, z)# Obtenemos las rectas de los gradientes para representarlasx_linea_gradiente, z_linea_gradiente = gradiente_linea(i_inicio, a=a, error=error, gradiente=dl)# Guardamos los valores para luego ver la evolución del entrenamiento en una gráficaAs[i] = aZs[i,:] = z_pErrores[i] = errorXs_linea_gradiente[i,:] = x_linea_gradienteZs_linea_gradiente[i,:] = z_linea_gradiente# Imprimimos la evolución del entrenamientoif (i+1)%10 == 0:print(f"i={i+1}: error={error}, gradiente={dl}, a={a}")Copied
i=10: error=28.075728775043547, gradiente=-61.98100236918255, a=1.1394358551489718i=20: error=9.50524503591466, gradiente=-30.709631939506394, a=1.569284692740735i=30: error=4.946395605365449, gradiente=-15.215654116766258, a=1.7822612353503635i=40: error=3.8272482302958437, gradiente=-7.5388767490642445, a=1.887784395436304i=50: error=3.552509863476323, gradiente=-3.7352756707945205, a=1.9400677933076504i=60: error=3.4850646173147437, gradiente=-1.8507112931062708, a=1.9659725680580205i=70: error=3.4685075514689503, gradiente=-0.9169690786711168, a=1.978807566971417i=80: error=3.464442973977972, gradiente=-0.4543292594425819, a=1.9851669041474533i=90: error=3.4634451649256888, gradiente=-0.22510581958202128, a=1.9883177551597053i=100: error=3.463200213782052, gradiente=-0.111532834297016, a=1.989878902465877
Vamos a representar en una gráfica la evolución del entrenamiento
# Creamos GIF con la evolución del entrenamientofrom matplotlib.animation import FuncAnimationfrom IPython.display import display, Image# Creamos la gráfica inicialfig, (ax1, ax2) = plt.subplots(1,2)fig.set_tight_layout(True)ax1.set_xlabel('X')ax1.set_ylabel('Z ', rotation=0)ax2.set_xlabel('a')ax2.set_ylabel('loss ', rotation=0)# Se dibujan los datos que persistiran en toda la evolución de la gráficaax1.scatter(x, z)ax2.plot(posibles_a, perdidas, linewidth = 3)# Se dibuja el resto de lineas que irán cambiando durante el entrenamientoline1, = ax1.plot(x, Zs[0,:], 'k', linewidth=2) # Recta generada con la pendiente a aprendidaline2, = ax2.plot(Xs_linea_gradiente[0,:], Zs_linea_gradiente[0,:], 'g') # Gradiente de la función de errorpunto2, = ax2.plot(As[0], Errores[0], 'r*') # Punto donde se calcula el gradiente# Se dibujan textos dentro de la segunda figura del subplotfontsize = 12a_text = ax2.text(1, 150, f'a = {As[0]:.2f}', fontsize = fontsize)error_text = ax2.text(1, 125, f'loss = {Errores[0]:.2f}', fontsize = fontsize)# Se dibuja un títulotitulo = fig.suptitle(f'step: {0}', fontsize=fontsize)# Se define la función que va a modificar la gráfica con la evolución del entrenamientodef update(i):# Se actualiza la linea 1. Recta generada con la pendiente a aprendidaline1.set_ydata(Zs[i,:])# Se actualiza la linea 2. Gradiente de la función de errorline2.set_xdata(Xs_linea_gradiente[i,:])line2.set_ydata(Zs_linea_gradiente[i,:])# Se actualiza el punto 2. Punto donde se calcula el gradientepunto2.set_xdata([As[i]])punto2.set_ydata([Errores[i]])# Se actualizan los textosa_text.set_text(f'a = {As[i]:.2f}')error_text.set_text(f'loss = {Errores[i]:.2f}')titulo.set_text(f'step: {i}')return line1, ax1, line2, punto2, ax2, a_text, error_text# Se crea la animación con un refresco cada 200 msinterval = 200 # msanim = FuncAnimation(fig, update, frames=np.arange(0, steps), interval=interval)# Se guarda la animación en un gifgif_name = "GIFs/entrenamiento_regresion.gif"anim.save(gif_name, dpi=80, writer='pillow')# Leer el GIF y mostrarlowith open(gif_name, 'rb') as f:display(Image(data=f.read()))# Se elimina la figura para que no se muestre en el notebookplt.close()Copied
<IPython.core.display.Image object>
Vamos a volver a explicar el proceso, pero sin detenernos tanto en cada detalle para afianzar los conceptos
Tenemos los siguientes valores x e y
x = np.array( [ 0. , 0.34482759, 0.68965517, 1.03448276, 1.37931034,1.72413793, 2.06896552, 2.4137931 , 2.75862069, 3.10344828,3.44827586, 3.79310345, 4.13793103, 4.48275862, 4.82758621,5.17241379, 5.51724138, 5.86206897, 6.20689655, 6.55172414,6.89655172, 7.24137931, 7.5862069 , 7.93103448, 8.27586207,8.62068966, 8.96551724, 9.31034483, 9.65517241, 10. ])z = np.array( [-0.16281253, 1.88707606, 0.39649312, 0.03857752, 4.0148778 ,0.58866234, 3.35711859, 1.94314906, 6.96106424, 5.89792585,8.47226615, 3.67698542, 12.05958678, 9.85234481, 9.82181679,6.07652248, 14.17536744, 12.67825433, 12.97499286, 11.76098542,12.7843083 , 16.42241036, 13.67913705, 15.55066478, 17.45979602,16.41982806, 17.01977617, 20.28151197, 19.38148414, 19.41029831])plt.scatter(x, z)plt.xlabel('X')plt.ylabel('Z ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
Así que usamos una sola neurona para intentar encontrar la recta que mejor se adapta a dichos puntos.
Solo necesitamos encontrar el mejor valor de a posible
Empezamos inicializando a con un valor aleatorio
random.seed(45)a = random.random()aCopied
0.2718754143840908
Calculamos los valores z que genera la neurona con el valor de a que acabamos de inicializar.
z_p = a*xplt.scatter(x, z)plt.plot(x, z_p, 'k')plt.xlabel('X')plt.ylabel('Z ', rotation=0)plt.show()Copied
<Figure size 640x480 with 1 Axes>
Pero vemos que con el valor de a que hemos establecido, la neurona no es capaz de asemejarse a los puntos.
Necesitamos saber cuán bueno o malo es el valor de a, de modo que calculamos el error de la salida de la neurona con respecto a los datos que tenemos. Para ello usamos el error cuadrático medio (ECM) o mean squared error (MSE) mediante la fórmula
loss = ∑i=1N ≤ft(zp-z\right)2N
Ahora mismo, nuestro error es
error = loss(z, z_p)errorCopied
103.72263739946467
Como ya tenemos una manera de medir el error, queremos disminuir el error, de modo que buscamos que el gradiente del error con respecto a a sea cero, o lo más cercano a cero. Para ello hacemos un bucle de entrenamiento en el que modificamos el valor de a mediante la fórmula
a' = a - α\partial loss\partial a
Donde α se denomina tasa de aprendizaje o learning rate y determina la velocidad de aprendizaje.
lr = 10**-3 # Tasa de aprendizaje o learning ratesteps = 100 # Numero de veces que se realiza el bucle de enrtenamiento# Matrices donde se guardarán los datos para luego ver la evolución del entrenamiento en una gráficaZs = np.empty([steps, len(x)])Xs_linea_gradiente = np.empty([steps, len(x_inicio)])Zs_linea_gradiente = np.empty([steps, len(z_inicio)])As = np.empty(steps)Errores = np.empty(steps)for i in range(steps):# Calculamos el gradientedl = gradiente(a, x, z)# Corregimos el valor de aa = a - lr*dl# Calculamos los valores que obtiene la red neuronalz_p = a*x# Obtenemos el errorerror = loss(z, z_p)# Obtenemos las rectas de los gradientes para representarlasx_linea_gradiente, z_linea_gradiente = gradiente_linea(i_inicio, a=a, error=error, gradiente=dl)# Guardamos los valores para luego ver la evolución del entrenamiento en una gráficaAs[i] = aZs[i,:] = z_pErrores[i] = errorXs_linea_gradiente[i,:] = x_linea_gradienteZs_linea_gradiente[i,:] = z_linea_gradiente# Imprimimos la evolución del entrenamientoif (i+1)%10 == 0:print(f"i={i+1}: error={error}, gradiente={dl}, a={a}")Copied
i=10: error=28.075728775043547, gradiente=-61.98100236918255, a=1.1394358551489718i=20: error=9.50524503591466, gradiente=-30.709631939506394, a=1.569284692740735i=30: error=4.946395605365449, gradiente=-15.215654116766258, a=1.7822612353503635i=40: error=3.8272482302958437, gradiente=-7.5388767490642445, a=1.887784395436304i=50: error=3.552509863476323, gradiente=-3.7352756707945205, a=1.9400677933076504i=60: error=3.4850646173147437, gradiente=-1.8507112931062708, a=1.9659725680580205i=70: error=3.4685075514689503, gradiente=-0.9169690786711168, a=1.978807566971417i=80: error=3.464442973977972, gradiente=-0.4543292594425819, a=1.9851669041474533i=90: error=3.4634451649256888, gradiente=-0.22510581958202128, a=1.9883177551597053i=100: error=3.463200213782052, gradiente=-0.111532834297016, a=1.989878902465877
Vemos que el error ha disminuido notablemente, de 103,72 que teníamos inicialmente a 3,46 que tenemos ahora.
Representamos la evolución del entrenamiento para verla gráficamente
!GIF











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}